The Device#
Resulting code: step015
A WebGPU device represents a context of use of the API. All the objects that we create (geometry, textures, etc.) are owned by the device.
🤔 Why do we have both an adapter and then a device abstraction?
The idea is to limit the “it worked on my machine” issue you could encounter when trying your program on a different machine. The adapter is used to access the capabilities of the user’s hardware, which are used to select the behavior of your application among very different code paths. Once a code path is chosen, a device is created with the capabilities we choose.
Only the capabilities selected for this device are then allowed in the rest of the application. This way, it is not possible to inadvertently rely on capabilities specific to your own machine.
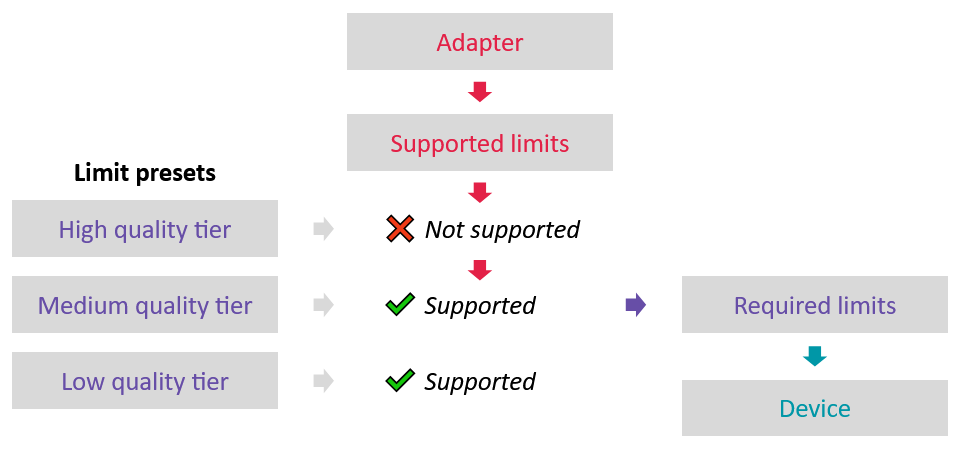
In an advanced use of the adapter/device duality, we can set up multiple limit presets and select one depending on the adapter. In our case, we have a single preset and abort early if it is not supported.#
Device request#
Requesting the device looks a lot like requesting the adapter, so we will use a very similar function:
/**
* Utility function to get a WebGPU device, so that
* WGPUAdapter device = requestDevice(adapter, options);
* is roughly equivalent to
* const device = await adapter.requestDevice(descriptor);
* It is very similar to requestAdapter
*/
WGPUDevice requestDevice(WGPUAdapter adapter, WGPUDeviceDescriptor const * descriptor) {
struct UserData {
WGPUDevice device = nullptr;
bool requestEnded = false;
};
UserData userData;
auto onDeviceRequestEnded = [](WGPURequestDeviceStatus status, WGPUDevice device, char const * message, void * pUserData) {
UserData& userData = *reinterpret_cast<UserData*>(pUserData);
if (status == WGPURequestDeviceStatus_Success) {
userData.device = device;
} else {
std::cout << "Could not get WebGPU device: " << message << std::endl;
}
userData.requestEnded = true;
};
wgpuAdapterRequestDevice(
adapter,
descriptor,
onDeviceRequestEnded,
(void*)&userData
);
assert(userData.requestEnded);
return userData.device;
}
Note
In the accompanying code, I moved these utility functions into webgpu-utils.cpp
#pragma once
#include <webgpu/webgpu.h>
/**
* Utility function to get a WebGPU adapter, so that
* WGPUAdapter adapter = requestAdapter(options);
* is roughly equivalent to
* const adapter = await navigator.gpu.requestAdapter(options);
*/
WGPUAdapter requestAdapter(WGPUInstance instance, WGPURequestAdapterOptions const * options);
/**
* Utility function to get a WebGPU device, so that
* WGPUAdapter device = requestDevice(adapter, options);
* is roughly equivalent to
* const device = await adapter.requestDevice(descriptor);
* It is very similar to requestAdapter
*/
WGPUDevice requestDevice(WGPUAdapter adapter, WGPUDeviceDescriptor const * descriptor);
/**
* An example of how we can inspect the capabilities of the hardware through
* the adapter object.
*/
void inspectAdapter(WGPUAdapter adapter);
/**
* Display information about a device
*/
void inspectDevice(WGPUDevice device);
#include "webgpu-utils.h"
#include <iostream>
#include <vector>
#include <cassert>
{{Utility functions}}
#include "webgpu-utils.h"
{{Dependency subdirectories}}
add_executable(App
{{App source files}}
)
{{Link libraries}}
main.cpp
webgpu-utils.h
webgpu-utils.cpp
In the main function, after getting the adapter, we can request the device:
std::cout << "Requesting device..." << std::endl;
WGPUDeviceDescriptor deviceDesc = {};
{{Build device descriptor}}
WGPUDevice device = requestDevice(adapter, &deviceDesc);
std::cout << "Got device: " << device << std::endl;
{{Request device}}
{{Setup device callbacks}}
And before destroying the adapter, we release the device:
wgpuDeviceRelease(device);
Device descriptor#
Let us look in webgpu.h what the descriptor looks like:
typedef struct WGPUDeviceDescriptor {
WGPUChainedStruct const * nextInChain;
char const * label;
uint32_t requiredFeaturesCount;
WGPUFeatureName const * requiredFeatures;
WGPURequiredLimits const * requiredLimits;
WGPUQueueDescriptor defaultQueue;
} WGPUDeviceDescriptor;
// (this struct definition is actually above)
typedef struct WGPUQueueDescriptor {
WGPUChainedStruct const * nextInChain;
char const * label;
} WGPUQueueDescriptor;
For now we will initialize this to a very minimal option:
deviceDesc.nextInChain = nullptr;
deviceDesc.label = "My Device"; // anything works here, that's your call
deviceDesc.requiredFeaturesCount = 0; // we do not require any specific feature
deviceDesc.requiredLimits = nullptr; // we do not require any specific limit
deviceDesc.defaultQueue.nextInChain = nullptr;
deviceDesc.defaultQueue.label = "The default queue";
We will come back here and refine these options whenever we will need some more capabilities from the device.
Note
The label is used in error message to help you debug where something went wrong, so it is good practice to use it as soon as you get multiple objects of the same type. Currently, this is only used by Dawn.
Device error callback#
Before moving on to the next section, I would like you to add this call after creating the device:
auto onDeviceError = [](WGPUErrorType type, char const* message, void* /* pUserData */) {
std::cout << "Uncaptured device error: type " << type;
if (message) std::cout << " (" << message << ")";
std::cout << std::endl;
};
wgpuDeviceSetUncapturedErrorCallback(device, onDeviceError, nullptr /* pUserData */);
This defines a callback that gets executed upon errors, which is very handy for debugging, especially when we will start using asynchronous operations.
If you use a debugger (which I recommend), like gdb or your IDE, I recommend you put a breakpoint in this callback, so that your program pauses and provides you with a call stack whenever WebGPU encounters an unexpected error.
Dawn
By default Dawn runs callbacks only when the device “ticks”, so the error callbacks are invoked in a different call stack than where the error occurred, making the breakpoint less informative. To force Dawn to invoke error callbacks as soon as there is an error, you can set the environment variable DAWN_DEBUG_BREAK_ON_ERROR to a non-empty non-zero value.
To automatically set this up in Visual Studio from CMake, you can add the following to your CMakeLists.txt:
set_target_properties(App PROPERTIES VS_DEBUGGER_ENVIRONMENT "DAWN_DEBUG_BREAK_ON_ERROR=1")
Note that this feature is imperfect and sometimes breaks in non-error cases. This has been reported, in the meantime just press “Continue” in your IDE when this happens.
Dawn again
Dawn will show a warning about a missing device lost callback. You may set it in a very similar way than the error callback, except as of now (2023-07-04) the API is different in the official webgpu.h header, so I won’t add it until this is settled.
Resulting code: step015
// We also add an inspect device function:
void inspectDevice(WGPUDevice device) {
std::vector<WGPUFeatureName> features;
size_t featureCount = wgpuDeviceEnumerateFeatures(device, nullptr);
features.resize(featureCount);
wgpuDeviceEnumerateFeatures(device, features.data());
std::cout << "Device features:" << std::endl;
for (auto f : features) {
std::cout << " - " << f << std::endl;
}
WGPUSupportedLimits limits = {};
limits.nextInChain = nullptr;
bool success = wgpuDeviceGetLimits(device, &limits);
if (success) {
std::cout << "Device limits:" << std::endl;
std::cout << " - maxTextureDimension1D: " << limits.limits.maxTextureDimension1D << std::endl;
std::cout << " - maxTextureDimension2D: " << limits.limits.maxTextureDimension2D << std::endl;
std::cout << " - maxTextureDimension3D: " << limits.limits.maxTextureDimension3D << std::endl;
std::cout << " - maxTextureArrayLayers: " << limits.limits.maxTextureArrayLayers << std::endl;
std::cout << " - maxBindGroups: " << limits.limits.maxBindGroups << std::endl;
std::cout << " - maxDynamicUniformBuffersPerPipelineLayout: " << limits.limits.maxDynamicUniformBuffersPerPipelineLayout << std::endl;
std::cout << " - maxDynamicStorageBuffersPerPipelineLayout: " << limits.limits.maxDynamicStorageBuffersPerPipelineLayout << std::endl;
std::cout << " - maxSampledTexturesPerShaderStage: " << limits.limits.maxSampledTexturesPerShaderStage << std::endl;
std::cout << " - maxSamplersPerShaderStage: " << limits.limits.maxSamplersPerShaderStage << std::endl;
std::cout << " - maxStorageBuffersPerShaderStage: " << limits.limits.maxStorageBuffersPerShaderStage << std::endl;
std::cout << " - maxStorageTexturesPerShaderStage: " << limits.limits.maxStorageTexturesPerShaderStage << std::endl;
std::cout << " - maxUniformBuffersPerShaderStage: " << limits.limits.maxUniformBuffersPerShaderStage << std::endl;
std::cout << " - maxUniformBufferBindingSize: " << limits.limits.maxUniformBufferBindingSize << std::endl;
std::cout << " - maxStorageBufferBindingSize: " << limits.limits.maxStorageBufferBindingSize << std::endl;
std::cout << " - minUniformBufferOffsetAlignment: " << limits.limits.minUniformBufferOffsetAlignment << std::endl;
std::cout << " - minStorageBufferOffsetAlignment: " << limits.limits.minStorageBufferOffsetAlignment << std::endl;
std::cout << " - maxVertexBuffers: " << limits.limits.maxVertexBuffers << std::endl;
std::cout << " - maxVertexAttributes: " << limits.limits.maxVertexAttributes << std::endl;
std::cout << " - maxVertexBufferArrayStride: " << limits.limits.maxVertexBufferArrayStride << std::endl;
std::cout << " - maxInterStageShaderComponents: " << limits.limits.maxInterStageShaderComponents << std::endl;
std::cout << " - maxComputeWorkgroupStorageSize: " << limits.limits.maxComputeWorkgroupStorageSize << std::endl;
std::cout << " - maxComputeInvocationsPerWorkgroup: " << limits.limits.maxComputeInvocationsPerWorkgroup << std::endl;
std::cout << " - maxComputeWorkgroupSizeX: " << limits.limits.maxComputeWorkgroupSizeX << std::endl;
std::cout << " - maxComputeWorkgroupSizeY: " << limits.limits.maxComputeWorkgroupSizeY << std::endl;
std::cout << " - maxComputeWorkgroupSizeZ: " << limits.limits.maxComputeWorkgroupSizeZ << std::endl;
std::cout << " - maxComputeWorkgroupsPerDimension: " << limits.limits.maxComputeWorkgroupsPerDimension << std::endl;
}
}
inspectDevice(device);