Loading from file 🟡¶
Resulting code: step058
Resulting code: step058-vanilla
This time, we are ready to load an actual 3D file format instead of the ad-hoc one we have been using so far, so that you can play with any model you’d like.
In this chapter we load 3D models from the OBJ format. This is a very common format for storing 3D meshes with extra attributes (vertex colors, normals, but also texture coordinates and any other arbitrary data). You can for instance create an OBJ file by exporting it from Blender.
TinyOBJLoader¶
Instead of manually parsing OBJ files, we use the TinyOBJLoader library. The file format is not that complex, but parsing files is not the main point of this tutorial series, and this library has been intensively tested and has a very small footprint.
Similarly to our webgpu.hpp wrapper, TinyOBJLoader is made of a single file tiny_obj_loader.h that you may simply save next to your main.cpp. Exactly one of your source files must define TINYOBJLOADER_IMPLEMENTATION before including it:
#define TINYOBJLOADER_IMPLEMENTATION // add this to exactly 1 of your C++ files
#include "tiny_obj_loader.h"
We create a new loading function:
bool loadGeometryFromObj(const fs::path& path, std::vector<VertexAttributes>& vertexData);
We can use the example code from TinyOBJLoader’s README as a base, that shows how to call the LoadObj function it provides:
bool loadGeometryFromObj(const fs::path& path, std::vector<VertexAttributes>& vertexData) {
tinyobj::attrib_t attrib;
std::vector<tinyobj::shape_t> shapes;
std::vector<tinyobj::material_t> materials;
std::string warn;
std::string err;
bool ret = tinyobj::LoadObj(&attrib, &shapes, &materials, &warn, &err, path.string().c_str());
if (!warn.empty()) {
std::cout << warn << std::endl;
}
if (!err.empty()) {
std::cerr << err << std::endl;
}
if (!ret) {
return false;
}
// Fill in vertexData here
return true;
}
Once the tinyobj-specific structures are filled in (shape_t, attrib_t), we can extract our vertex array data, making the code a bit clearer:
// Filling in vertexData:
const auto& shape = shapes[0]; // look at the first shape only
vertexData.resize(shape.mesh.indices.size());
for (size_t i = 0; i < shape.mesh.indices.size(); ++i) {
const tinyobj::index_t& idx = shape.mesh.indices[i];
vertexData[i].position = {
attrib.vertices[3 * idx.vertex_index + 0],
attrib.vertices[3 * idx.vertex_index + 1],
attrib.vertices[3 * idx.vertex_index + 2]
};
vertexData[i].normal = {
attrib.normals[3 * idx.normal_index + 0],
attrib.normals[3 * idx.normal_index + 1],
attrib.normals[3 * idx.normal_index + 2]
};
vertexData[i].color = {
attrib.colors[3 * idx.vertex_index + 0],
attrib.colors[3 * idx.vertex_index + 1],
attrib.colors[3 * idx.vertex_index + 2]
};
}
We can generalize to all the parts of the model by iterating over shapes:
vertexData.clear();
for (const auto& shape : shapes) {
size_t offset = vertexData.size();
vertexData.resize(offset + shape.mesh.indices.size());
// [...]
vertexData[offset + i].position = /* ... */;
vertexData[offset + i].normal = /* ... */;
vertexData[offset + i].color = /* ... */;
}
Note
🤔 Why did we stop using indexed drawing here?
The OBJ file format is more flexible than what the GPU rasterization pipeline can handle. Typically a vertex whose position p1 is shared by 2 triangles but that have different normals n1/n1b is possible in an OBJ file:
# Inside the OBJ file
f 3 p1/n1 p2/n2 p3/n3
f 3 p1/n1b p4/n4 p5/n5
# ^^^ index of the normal
# ^^ index of the position
# ^ number of points in the face
But in an indexed draw call, two vertices that have the same index must share all of their attributes, otherwise they must be considered as 2 different vertices. So either way, we need to reorganise the data between what we load from the file and what we store in GPU buffers.
Loading a first object¶
We stop using indexed drawing but switch to a vector of VertexAttributes rather than a blind vector of float for the vertex buffer data:
std::vector<VertexAttributes> vertexData;
bool success = loadGeometryFromObj(RESOURCE_DIR "/pyramid.obj", vertexData);
if (!success) {
std::cerr << "Could not load geometry!" << std::endl;
return 1;
}
// [...]
bufferDesc.size = vertexData.size() * sizeof(VertexAttributes);
// [...]
queue.writeBuffer(vertexBuffer, 0, vertexData.data(), bufferDesc.size);
// [...]
int indexCount = static_cast<int>(vertexData.size());
// (remove 'Create index buffer')
// [...]
renderPass.setVertexBuffer(0, vertexBuffer, 0, vertexData.size() * sizeof(VertexAttributes));
// (remove renderPass.setIndexBuffer)
// [...]
renderPass.draw(indexCount, 1, 0, 0);
// [...]
// (remove indexBuffer destruction)
std::vector<VertexAttributes> vertexData;
bool success = loadGeometryFromObj(RESOURCE_DIR "/pyramid.obj", vertexData);
if (!success) {
std::cerr << "Could not load geometry!" << std::endl;
return 1;
}
// [...]
bufferDesc.size = vertexData.size() * sizeof(VertexAttributes);
// [...]
wgpuQueueWriteBuffer(queue, vertexBuffer, 0, vertexData.data(), bufferDesc.size);
// [...]
int indexCount = static_cast<int>(vertexData.size());
// (remove 'Create index buffer')
// [...]
wgpuRenderPassSetVertexBuffer(renderPass, 0, vertexBuffer, 0, vertexData.size() * sizeof(VertexAttributes));
// (remove wgpuRenderPassSetIndexBuffer)
// [...]
wgpuRenderPassDraw(renderPass, indexCount, 1, 0, 0);
// [...]
// (remove indexBuffer destruction)
One last thing we need is to increase the maximum buffer size to be able to load various meshes:
// Update max buffer size to allow up to 10000 vertices in the loaded file:
requiredLimits.limits.maxBufferSize = 10000 * sizeof(VertexAttributes);
Test this with pyramid.obj, which is the same pyramid but with beveled edges (I also set the T1 = mat4x4(1.0) and focalPoint = vec3(0.0, 0.0, -1.0)):
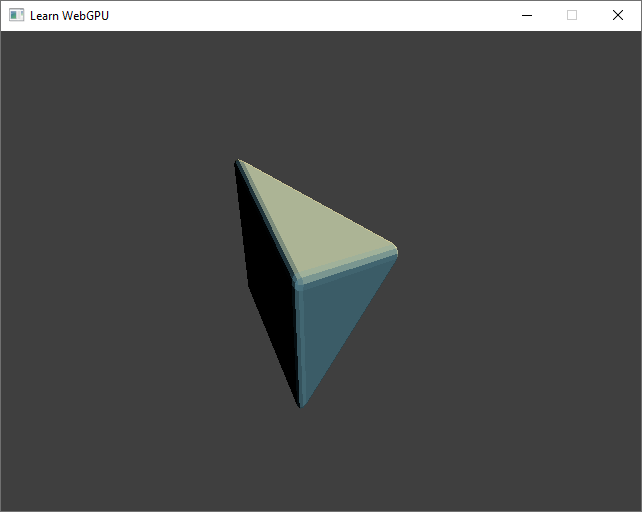
The 3D model is correctly loaded but not oriented as expected.¶
Note
If you see a warning about missing material information when loading the OBJ, do not worry:
material [ 'None' ] not found in .mtl
OBJ files may have a companion .mtl file providing information about materials but we do not use this information here.
Vertical axis convention¶
There is no consensus among 3D modeling and 3D rendering tools about which axis should represent the vertical direction. But file formats usually impose a convention. In the case of the OBJ format, it is specified that the Y axis represents the upward vertical direction.
Since we have been implicitly following the convention that Z is the vertical in our code, we need to either change our convention (by changing the view matrix) or convert upon loading. I chose the latter:
vertexData[i].position = {
attrib.vertices[3 * idx.vertex_index + 0],
-attrib.vertices[3 * idx.vertex_index + 2], // Add a minus to avoid mirroring
attrib.vertices[3 * idx.vertex_index + 1]
};
// Also apply the transform to normals!!
vertexData[i].normal = {
attrib.normals[3 * idx.normal_index + 0],
-attrib.normals[3 * idx.normal_index + 2],
attrib.normals[3 * idx.normal_index + 1]
};
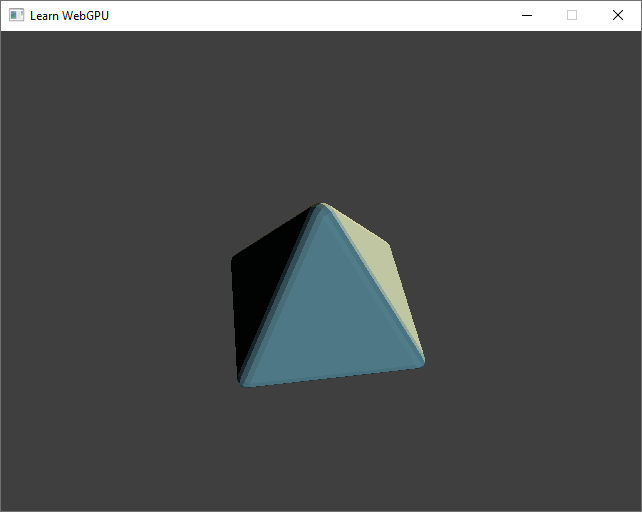
The loaded 3D model, correctly oriented.¶
Another example¶
Want something a bit more interesting? Try mammoth.obj! And thank the Smithsonian for sharing the model.
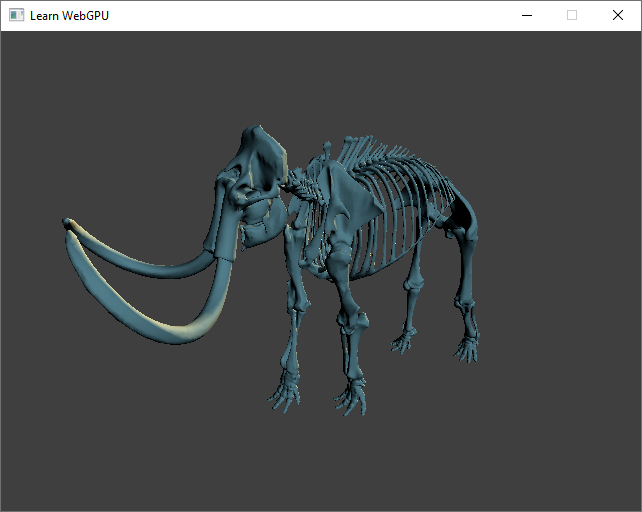
A complex 3D model.¶
Conclusion¶
This chapter concludes this part about loading and rendering 3D meshes. It was quite of a part, congratulations for having followed so far!
From now on we will see how to improve on top of this base, but feel free to take some time to play around.
You can now load your own models (going through Blender to convert them if you get them in a different file format), animate the position of different objects, change the lighting (even animate it using uniforms), etc.
Resulting code: step058
Resulting code: step058-vanilla